
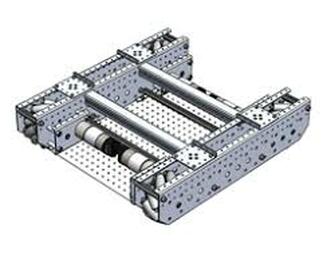
ChassisWe currently use the HD mecanum tilerunner from Andymark. We use orbital 20 motors to drive this chassis.
|
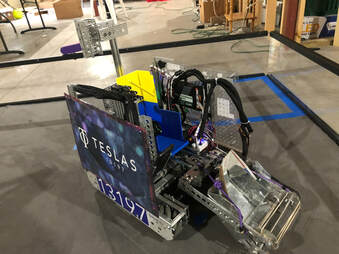
ScoringOur robot uses an extending intake to gather minerals from the crater. This intake then dumps the minerals into a bucket which extends and dumps them into the lander. For hanging, we have a hook on the back of our robot powered by a lead screw.
|
AutonomousIn autonomous, our robot first lands from the latch on the lander. Then it picks out the gold mineral which it sees using a phone camera. It then drops a team marker into the depot and parks in the crater.
|
